DonkeyCar入门教程-校准油门
说明:
- 介绍如何校准DonkeyCar的油门
步骤:
- 油门校准:
- 找到来自ESC的电缆,看看它进入PCA板的通道。 这是你的油门频道。
- 运行 donkey calibrate –channel <your_throttle_channel>
- 当提示PWM值,输入 370
- 您应该听到您的ESC哔音,表示它已经过校准。
- 输入400,你应该看到你的车轮开始前进。 如果不是,可能这是相反的,请尝试输入330。
- 继续尝试不同的值,直到找到合理的最大速度并记住此PWM值。
- 在遥控车上反转有点棘手,因为ESC必须接收反向脉冲,零脉冲,反向脉冲才能开始反向运行。 要校准反向PWM设置
- 使用与上述相同的技术将PWM设置设置为零油门
- 输入倒数值,然后输入零油门值,然后再输入倒数值。
- 输入倒数值的+/- 10,以找到合理的倒退速度。 记住这个反向PWM值。
- 现在打开你的config.py脚本,并将你的小车的PWM值输入到throttle_controller部分。
- THROTTLE_FORWARD_PWM =全油门正转时的PWM值
- THROTTLE_STOPPED_PWM =零油门时的PWM值
- THROTTLE_REVERSE_PWM =全油门反转时的PWM值
2.微调您的校准:
- 现在您已经仔细校准过,您可以尝试开动它以验证它是否按预期运行。

- 以下是如何微调小车的校准。
- 运行python manage.py drive启动小车
- 浏览器打开<your_cars_ip_address>:8887
- 按下 j 直到汽车转向完全正确。
- 按下i几次让小车前进。
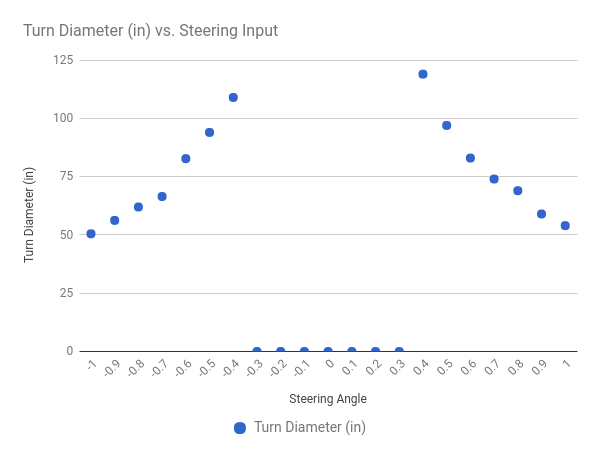
- 测量转弯的直径并将其记录在电子表格中
- 针对不同的转向值重复此测量以转向每个方向。
- 绘制这些图表,以便您可以查看您的车在各个方向上的转向是否相同。
- 校正如果您的小车在转弯80%和转弯100%时转动的量相同,请将该转弯方向的PWM设置更改为80%的PWM值。
- 如果您的小车偏向于转向一个方向,请改变转向的偏置值的相反方向的PWM值。
- 在你调好你的车后,转向图应该看起来像这样。
参考:
- http://docs.donkeycar.com/guide/calibrate/