亚马逊发布了DeepRacer开源代码 作者 donggua 2021-04-2901.自动驾驶无评论 2018年11月,亚马逊推出了AWS DeepRacer,这是一款鞋盒大小的汽车,运行在通过强化学习技术在虚拟环境中训练的人工智能模型上。从那以后,DeepRacer开始扩张,推出了一个女子联赛和新的微型赛车。从今天开始,亚马逊将开放DeepRacer设备软件的源代码。 疫情促进了企业的自动化和机器人技术。根据Statista的数据,全球机器 ... 阅读全文
282km/h!英国Robocar刷新自动驾驶汽车最高车速记录 作者 donggua 2019-10-2901.自动驾驶无评论 一个众所周知的事实,自动驾驶将成为汽车的未来,那么一辆自动驾驶汽车究竟能跑多快呢?英国自动驾驶汽车公司Roborace给出了答案。 2019年10月21日消息,在近日的一次竞速测试中,Roborace公司的自动驾驶汽车Robocar跑出了282km/h的最高车速,一举刷新了自动驾驶汽车的最高车速记录,同时入围吉尼斯世界纪录。 在英国约克 ... 阅读全文
Robocar的前世今生 作者 donggua 2019-03-2901.自动驾驶无评论 说起Robocar,我们需要先介绍一下Roborace。Roborace是一项电动无人驾驶汽车竞赛,所有参赛车辆都采用相同设计,完全比拼软件设计能力。在真正的比赛开始后,参赛团队应该就不能继续施加人为指令,而是完全交给软件自行判断。Roborace于2017年2月举行了第一场比赛。两辆DevBot无人驾驶电动赛车,在布宜诺斯艾利斯的ePrix ... 阅读全文
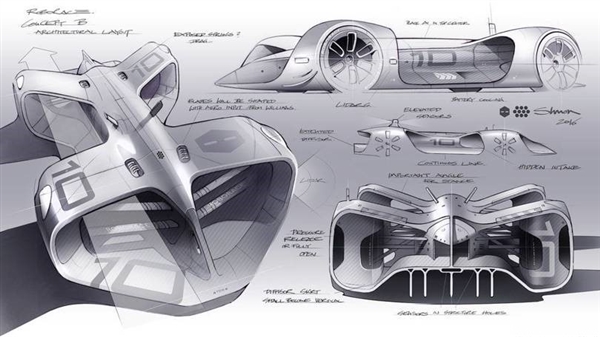
首辆自动驾驶赛车,4台电机驱动,简直就是一辆速度怪兽! 作者 donggua 2019-03-2601.自动驾驶无评论 在 Roborace(电动无人驾驶汽车竞赛,2017年2月在布宜诺斯艾利斯举行首场比赛)上,发布了一款世界首款完全自动驾驶赛车Robocar……(它到底有多炫酷?!有多骚气 Robocar 是 Roborace 公司(极具“玩票”属性的创业公司)开发的世界上第一款无人驾驶赛车…… 由未来派汽车设计师 Daniel Simon (该设计师因其在《遗落战 ... 阅读全文
Roborace无人驾驶赛车DevBot发布 作者 donggua 2019-03-2501.自动驾驶无评论 2016年8月Roborace新系列车型在Formula E多宁顿公园赛道开启首秀。 DevBot是Roborace赛事的一款新型无人驾驶电动赛车,经过机场赛道等地的测试之后,无人驾驶赛车DevBot在2016年8月24日与公众首次见面。 与以往的Raborace无人驾驶汽车不同的是,DevBot既可以由人工操作也可以由电脑操作。这样一来,研发团队就可以针对赛 ... 阅读全文
还记得Roborace无人驾驶赛车吗?它终于上赛道了 作者 donggua 2019-03-2501.自动驾驶无评论 在2017年5月的FormuleE巴黎站上,Roborace终于迎来了自己的又一个里程碑。他们的「赛车」,在赛道上进行了首次亮相。另外,Roborace无人驾驶赛车还参加了测试圈,但是,由于车辆以「感知模式」了解赛道环境,所以行进速度非常慢。工程师们在测试过程当中,还检查了车辆行驶路线是否准确。 为什么说是有里程碑意义的事件呢 ... 阅读全文
自动驾驶赛车Robocar 作者 donggua 2019-03-2501.自动驾驶无评论 2017年前后,蔚来汽车旗下EP9电动车刚刚创造了257公里每小时的无人驾驶速度纪录,短短几天后,Roborace便以320公里的时速试图打破它。这种无人驾驶市场玩家的你追我赶,就像Roborace参与的赛车竞速的缩影。 2017年2月17日,在Roborace举办的“全球首场无人驾驶汽车竞赛”中,其中一辆测试车在过弯时撞上护栏,质疑也随之 ... 阅读全文
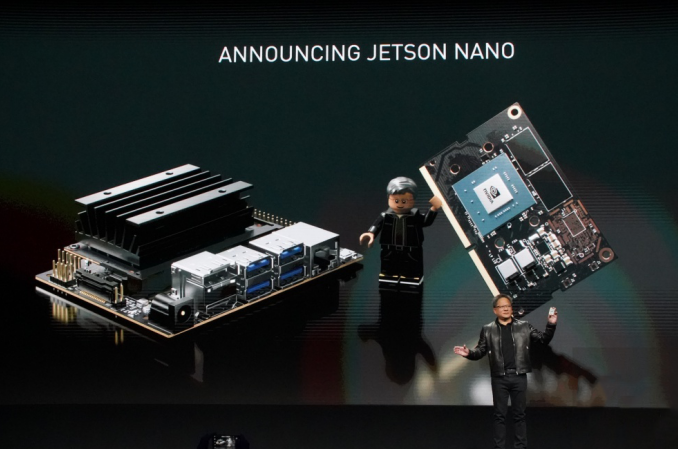
99美元AI计算机来了!英伟达Nvidia推出嵌入式电脑Jetson Nano和无人驾驶模型车Kaya 作者 donggua 2019-03-1901.自动驾驶, 02.开源硬件无评论 3月19日,由英伟达举办的2019 GTC(GPU技术大会)在美国加州圣何塞举行,英伟达CEO黄仁勋发表主题演讲,正式发布了机器人开发者工具箱Jetson Nano,可以为机器人设计引入AI算力。 黄仁勋称,英伟达正在为其Jetson产品系列推出一款新的嵌入式计算机,用于开发部署人工智能,这是迄今为止最小的计算机,CUDA-X计算机被命名 ... 阅读全文
对无人驾驶汽车感兴趣?现在你可以构造(并竞赛)自己的车! 作者 donggua 2019-03-1801.自动驾驶无评论 DIY Robocars UK – 弗罗姆的一个新团体 – 在4月,5月和6月在Welshmill Hub举办的月度“Hack and Race”活动之后,作为Frome Festival的一部分,在Welshmill Pump Track上运行Summer Bash。 有兴趣建造自己的比例模型无人驾驶汽车的爱好者可以购买商用套件或用计算机视觉和Raspberry Pi电脑组装自己的汽车。 ... 阅读全文
DIY Robocars China自动驾驶挑战赛2019 作者 donggua 2019-01-2101.自动驾驶, 02.开源硬件1条评论 为什么要举办自动驾驶挑战赛2019? 第一次挑战赛解决以下问题: 你的车可以自己绕车道行驶吗? 谁的车最快? 阅读全文
DonkeyCar如何购买? 作者 donggua 2018-12-1001.自动驾驶, 02.开源硬件无评论 物料清单 HSP1/16 无限94186遥控车越野车四驱无刷大脚车高速赛车充电车模 购买链接:https://item.taobao.com/item.htm?spm=a1z09.2.0.0.4c2c2e8dYxRv5l&id=548208111638&_u=7m5kdc4162 价格:RMB399.00 16路 PWM/Servo/舵机驱动板 控制器 机器人 IIC PCA9685 购买链接:https://item.taobao.com/item.ht ... 阅读全文
究竟是购买还是构建一台自动驾驶赛车,怎么选择呢? 作者 donggua 2018-12-0201.自动驾驶无评论 研发公共道路上行驶的自动驾驶汽车需要大部分资源,但我们可以基于个人预算和技能水平、通过修改遥控玩具车来探索一般性的所有相同概念。对于我们这些对软件感兴趣和专业知识的人来说,亚马逊网络服务刚刚启动了 AWS DeepRacer:一个完整的软件包,用于探索自动驾驶汽车的机器学习。 在硬件级别,规格表听起来 ... 阅读全文
Donkey Car 常见问题 作者 donggua 2018-11-0701.自动驾驶, 02.开源硬件无评论 什么类型的遥控车可以与Donkey平台一起使用? 大多数业余爱好等级的RC汽车都可以与电子设备配合使用,但您需要制作自己的底板和相机支架。为了确保汽车能与Donkey一起工作,请按以下清单检查: 单独的ESC和接收器。一些较便宜的汽车将这些组合在一起,因此需要焊接才能将Donkey电机控制器连接到ESC。 ESC使用三线连接器, ... 阅读全文
用强化学习在Unity模拟器中训练Donkey Car(下) 作者 donggua 2018-10-2801.自动驾驶无评论 4.3 用DDQN训练Donkey Car 准备好了对强化学习友好的环境,我们现在就可以搭建自己的强化学习算法啦!我采取的是用Keras书写的Double Deep Q学习算法,这是DeepMind开发的经典强化学习算法,易于测试,编写简单。我已经在OpenAI gym中的cartpole和VizDoom中测试了,所以如果有什么问题,应该是Unity环境的问题,算法没有问 ... 阅读全文
用强化学习在Unity模拟器中训练Donkey Car(上) 作者 donggua 2018-10-1701.自动驾驶无评论 小编的话:本文译自https://flyyufelix.github.io/2018/09/11/donkey-rl-simulation.html Donkey Car在Unity Simulator中使用Double Deep Q Learning(DDQN)进行训练。 1.简介 Donkey Car是一款适用于小型RC车的开源DIY自动驾驶平台。对于那些想要了解更多关于自动驾驶但却没有知识或背景来构建无人车的人,该平台提 ... 阅读全文
DonkeyCar入门教程-训练导航模型 作者 donggua 2018-08-2301.自动驾驶无评论 DonkeyCar入门教程-训练导航模型 说明: 介绍如何通过DonkeyCar训练一个导航模型 步骤: 使用Keras训练小车 现在你可以可靠地驾驶你的车,你可以使用Keras来训练一个神经网络来像你一样开车。 以下是步骤。 收集数据 确保你收集好的数据。 练习在不记录数据的情况下多次驾驶赛道。 当你确信你可以无误地驾驶10圈时 ... 阅读全文
DonkeyCar入门教程-校准油门 作者 donggua 2018-08-2301.自动驾驶无评论 DonkeyCar入门教程-校准油门 说明: 介绍如何校准DonkeyCar的油门 步骤: 油门校准: 找到来自ESC的电缆,看看它进入PCA板的通道。 这是你的油门频道。 运行 donkey calibrate –channel <your_throttle_channel> 当提示PWM值,输入 370 您应该听到您的ESC哔音,表示它已经过校准。 输入400,你应该看到你 ... 阅读全文
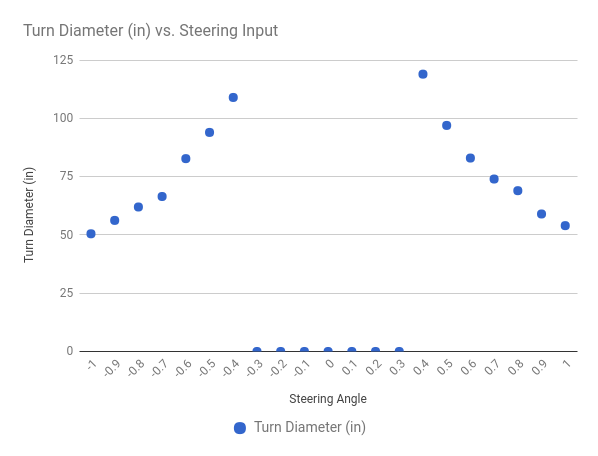
DonkeyCar入门教程-校准转向 作者 donggua 2018-08-2301.自动驾驶无评论 DonkeyCar入门教程-校准转向 说明: 介绍如何校准舵机的转向 步骤: 如何修改小车配置 所有配置都在config.py文件,这个文件是运行donkey createcar –path ~/d2指令时候生成的 可以使用nano ~/d2/config.py命令进行编辑 我们的目标是编辑这些设置,让您的车像其他校准的Donkey2一样驾驶。 这样您就可以在每辆车 ... 阅读全文
DonkeyCar入门教程-游戏杆控制 作者 donggua 2018-08-2301.自动驾驶无评论 DonkeyCar入门教程-游戏杆控制 说明: 介绍如何通过游戏杆控制donkeycar 步骤: 安装蓝牙和配对游戏杆 启动小车 cd ~/d2 python manage.py drive --js 如果想默认启动 或者,如果您希望默认使用游戏杆,并且不希望每次都添加–js,请修改config.py,USE_JOYSTICK_AS_DEFAULT = True nano config.py 游戏 ... 阅读全文
DonkeyCar入门教程-WEB控制 作者 donggua 2018-08-2301.自动驾驶无评论 DonkeyCar入门教程-WEB控制 说明: 介绍如何根据web界面来控制小车 步骤: 在手机上,您现在可以按下开始将手机当前的倾斜设置为零油门和转向。 现在将手机向前倾斜会增加油门,并将侧向倾斜会转向转向。 优点: 录制 – 按录制数据开始录制图像,转向数据和油门数据 油门模式 – 选择将油门设置为常量。 对 ... 阅读全文